快速开始
数据下载
案例1 - 非稀疏定位数据
轨迹数据清洗
# 读取GPS样例数据
import pandas as pd
from gotrackit.gps.Trajectory import TrajectoryPoints
gps_df = pd.read_csv(r'./data/input/QuickStart-Match-1/example_gps.csv')
# 利用gps数据构建TrajectoryPoints, 并且对数据进行清洗
# 是否需要进行该步操作视实际情况而定
tp = TrajectoryPoints(gps_points_df=gps_df, plain_crs='EPSG:32649')
tp.lower_frequency(lower_n=2).kf_smooth(o_deviation=0.3) # 由于样例数据定位频率高且有一定的误差,因此先做间隔采样然后执行滤波平滑
gps_df = tp.trajectory_data(_type='df')
构造Net对象
import geopandas as gpd
from gotrackit.map.Net import Net
# 读取路网数据并且构建Net类、初始化
link = gpd.read_file(r'./data/input/net/xian/modifiedConn_link.shp')
node = gpd.read_file(r'./data/input/net/xian/modifiedConn_node.shp')
my_net = Net(link_gdf=link, node_gdf=node, not_conn_cost=1200)
my_net.init_net() # net初始化
设置MapMatch参数
from gotrackit.MapMatch import MapMatch
# 构建匹配类
# 指定要输出HTML可视化文件
# 指定项目的标志字符flag_name='general_sample', 这个用户可以自定义
# gps数据时间列的值都是形如2022-05-12 16:27:46,因此指定时间列格式为 '%Y-%m-%d %H:%M:%S'
# 关于gps_buffer的确定,需要将路网和gps数据一同使用gis软件可视化,大概确定GPS数据和候选路段的距离
mpm = MapMatch(net=my_net, gps_buffer=120, flag_name='general_sample', time_format='%Y-%m-%d %H:%M:%S',
use_heading_inf=True, omitted_l=6.0, export_html=True, del_dwell=False,
out_fldr=r'./data/output/match_visualization/QuickStart-Match-1', dense_gps=False,
gps_radius=20.0)
# 执行匹配
# 第一个返回结果是匹配结果表
# 第二个是发生警告的agent的相关信息({agent_id1: pd.DataFrame(), agent_id2: pd.DataFrame()...})
# 第三个是匹配出错的agent的id列表(GPS点经过预处理(或者原始数据)后点数量不足2个)
match_res, warn_info, error_info = mpm.execute(gps_df=gps_df)
match_res.to_csv(fr'./data/output/match_visualization/QuickStart-Match-1/general_match_res.csv',
encoding='utf_8_sig', index=False)
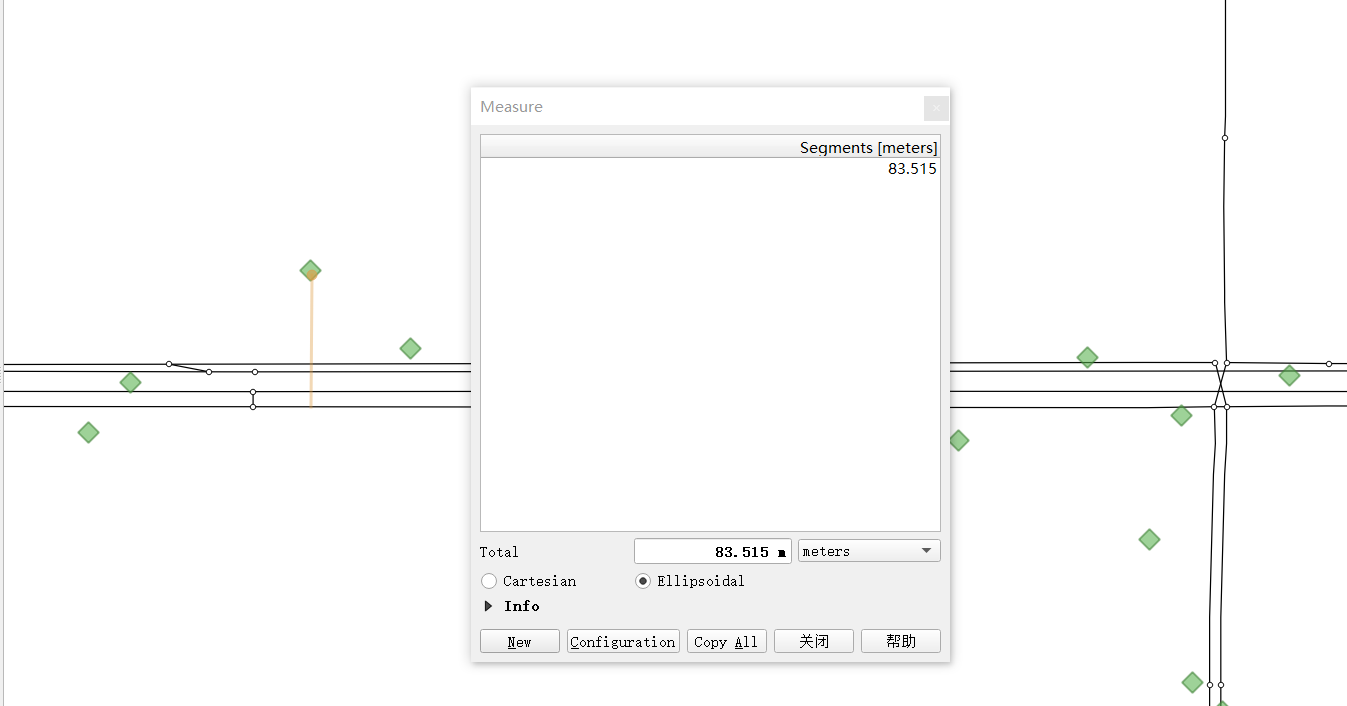
关于如何确定gps_buffer,这个和GPS的定位误差大小有关系,如下图,我们将GPS数据与路网一同在QGIS中进行可视化

可以看到GPS点定位频率不算低,且定位点偏离道路不算远,大概在85米左右,为了确保所有的GPS点都能关联到候选路段,我们取gps_buffer=120米较为合适
案例2 - 稀疏定位数据
数据处理与路径匹配
import pandas as pd
import geopandas as gpd
from gotrackit.map.Net import Net
from gotrackit.MapMatch import MapMatch
from gotrackit.gps.Trajectory import TrajectoryPoints
if __name__ == '__main__':
# 读取GPS样例数据
gps_df = pd.read_csv(r'./data/input/QuickStart-Match-1/example_sparse_gps.csv')
# 利用gps数据构建TrajectoryPoints, 是否需要进行该步操作视实际情况而定
tp = TrajectoryPoints(gps_points_df=gps_df, plain_crs='EPSG:32649')
tp.dense(dense_interval=120) # 由于样例数据是稀疏定位数据,我们在匹配前进行增密处理
gps_df = tp.trajectory_data(_type='df')
tp.export_html(out_fldr=r'./data/output/match_visualization/QuickStart-Match-1') # 输出增密前后的轨迹对比
# 读取路网数据并且构建Net类、初始化
link = gpd.read_file(r'./data/input/net/xian/modifiedConn_link.shp')
node = gpd.read_file(r'./data/input/net/xian/modifiedConn_node.shp')
my_net = Net(link_gdf=link, node_gdf=node, not_conn_cost=1200)
my_net.init_net() # net初始化
# 由于轨迹点中大部分点是增密后的点,所以我们需要将gps_buffer调大才能确保轨迹点关联到路段
# 由于我们已经提前将GPS数据进行增密,因此不需要使用MapMatch中的增密 - dense_gps=False
mpm = MapMatch(net=my_net, gps_buffer=700, top_k=20, flag_name='sparse_sample',
export_html=True, time_format='%Y-%m-%d %H:%M:%S', use_heading_inf=True,
out_fldr=r'./data/output/match_visualization/QuickStart-Match-1', dense_gps=False,
gps_radius=15.0)
# 执行匹配
# 第一个返回结果是匹配结果表
# 第二个是发生警告的agent的相关信息({agent_id1: pd.DataFrame(), agent_id2: pd.DataFrame()...})
# 第三个是匹配出错的agent的id列表(GPS点经过预处理(或者原始数据)后点数量不足2个)
match_res, warn_info, error_info = mpm.execute(gps_df=gps_df)
match_res.to_csv(fr'./data/output/match_visualization/QuickStart-Match-1/sparse_match_res.csv',
encoding='utf_8_sig', index=False)
如下图,我们可看到,GPS点进行增密后,增密点距离候选路段很远,大概有350米左右(蓝色点为源数据点,红色点为增密后的点)
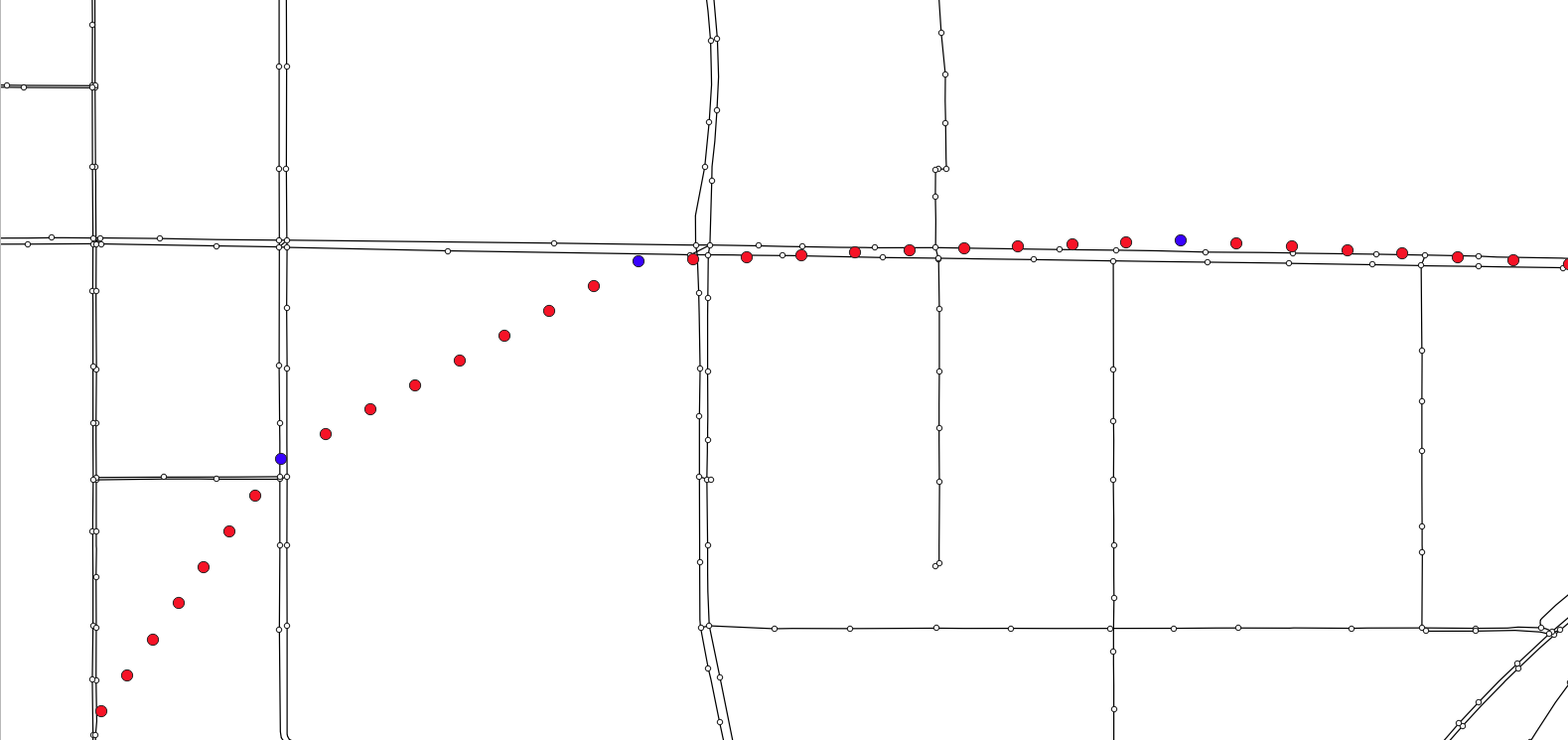
为了保证所有的增密点都能关联到候选路段,我们考虑较多的富余,取值gps_buffer=700,top_k=20,即选取每个GPS点附近700米范围内的最近20个路段作为候选路段

Note
其他参数思路-策略2:应对稀疏定位数据,我们也可以选择不增密的策略,比如提供较大的gps_buffer和cut_off参数: 本例中use_sub_net=True,gps_buffer取值1000,cut_off取值1500,不启用轨迹增密,依旧可以匹配成功
Note
其他参数思路-策略3:应对稀疏定位数据,我们也可以选择不增密、不使用子网络,但是要提供较大的cut_off参数:本例中use_sub_net=False,gps_buffer取值150,cut_off取值1500,不启用轨迹增密,依旧可以匹配成功
轨迹可视化
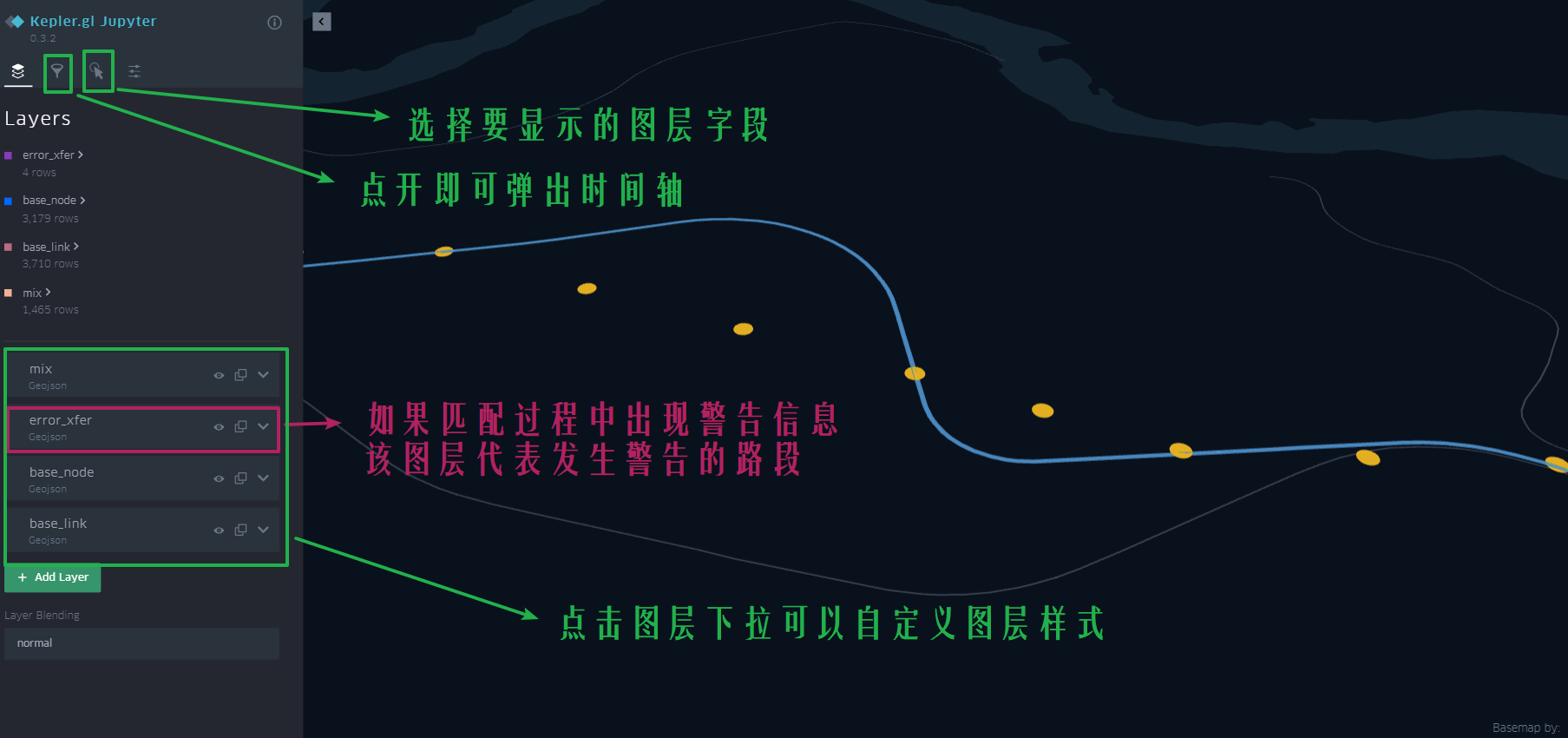
打开tp.export_html函数输出的文件,按照如下图所示可以查看处理前后的轨迹点(蓝色:源数据;黄色:处理后的数据)
匹配结果可视化